2023 FIRST Championship conference schedule
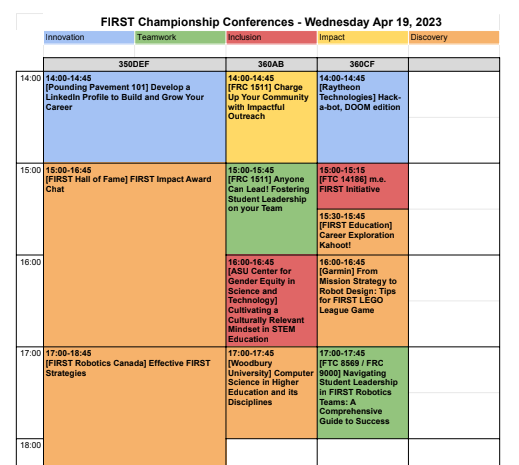
A graphical schedule for the Championship Conferences at the 2023 FIRST Championship in Houston, TX. This data was painstakingly extricated from the FIRST Championship app.
Previously: 2022 version. Tip of the hat to Jon Stratis’ 2019 version.