Category: Mechanical
Triple Helix linear actuator FRC Workshop talk

Triple Helix mentor Todd Ferrante presents on the team’s linear actuator designs at the 2016 FIRST Chesapeake FRC Workshops at Virginia Commonwealth University in Richmond, Virginia. In the talk, Todd describes the linear actuator design that was used in both our 2015 robot, to raise and lower the cans, and in our 2016 robot, in the climber mechanism. The accompanying video shows examples of this device in action.
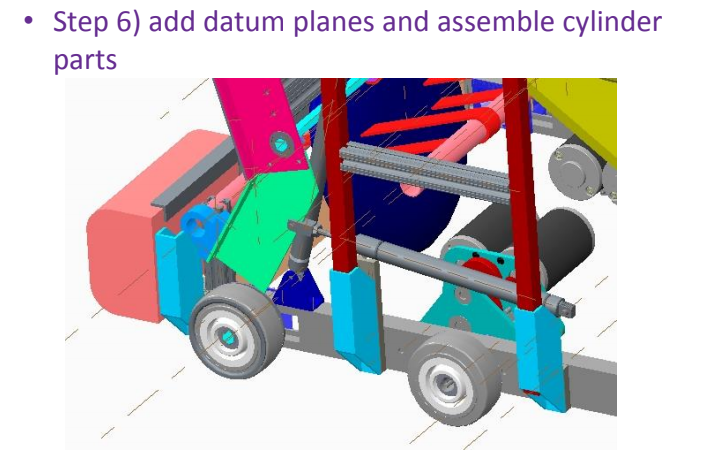
Gas-powered robotic ground vehicle talk

Triple Helix students Ben Bretton, Sam Tatum, and Gabe Odachowski present on the team’s summer 2016 project to develop a gas-powered robotic ground vehicle. The talk was given at the FRC Summit at Christopher Newport University to an audience of other Hampton Roads FRC students and mentors.
Adapting the FingerTech 2″ mecanums for FRC use

Triple Helix’s changes to FingerTech 2.125″ OD mecanums, as seen on our 2016 FRC robot.
Tables and stools: understanding exact constraint design of deformable-body systems
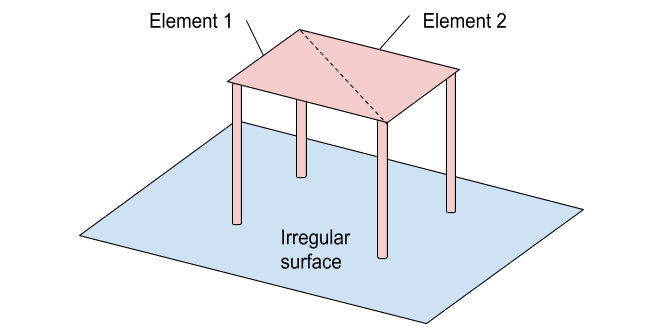
Triple Helix students help Jefferson Lab engineers meet the goal of “exact constraint” design of multiple-element structures.
Snap ring groove machining procedure

Here’s the procedure we use to create a snap ring groove feature in our standard 1/2″ hex shaft. This procedure is referenced within episode 7 of the “Triple Helix builds a drivetrain” video series.
Doc Ock arm shaft failure

A shaft within our ‘Doc Ock’ arm failed quite spectacularly in our second qualification match of the 2015 Virginia Regional. Here’s an in-depth look at what happened.
Triple Helix west coast drivetrains FRC Summit talk
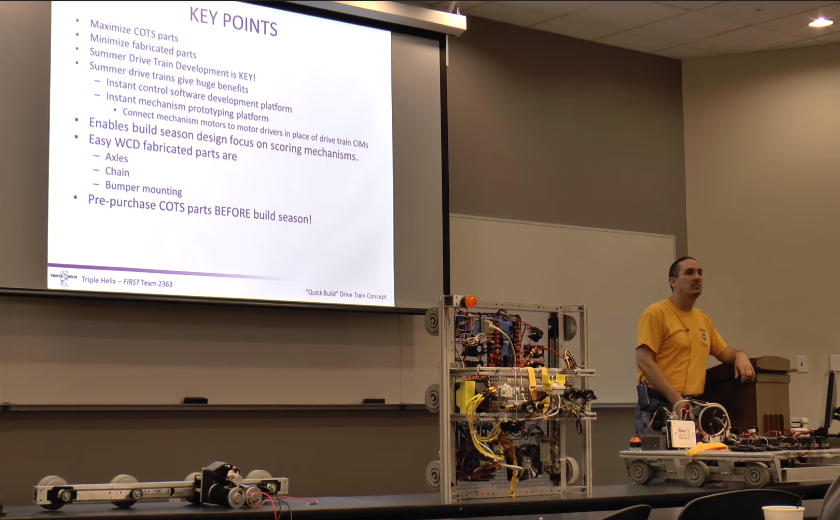
Triple Helix mentor Todd Ferrante presents on the team’s west coast drivetrain designs at the 2014 FRC Summit at Old Dominion University in Norfolk, Virginia. In the talk, Todd describes our efforts to develop a west coast drivetrain, using commercial off the shelf components, for fast building during build season. Our drivetrains have evolved through several generations. Todd describes some of the features of the various versions and talks about lessons learned during the development process.