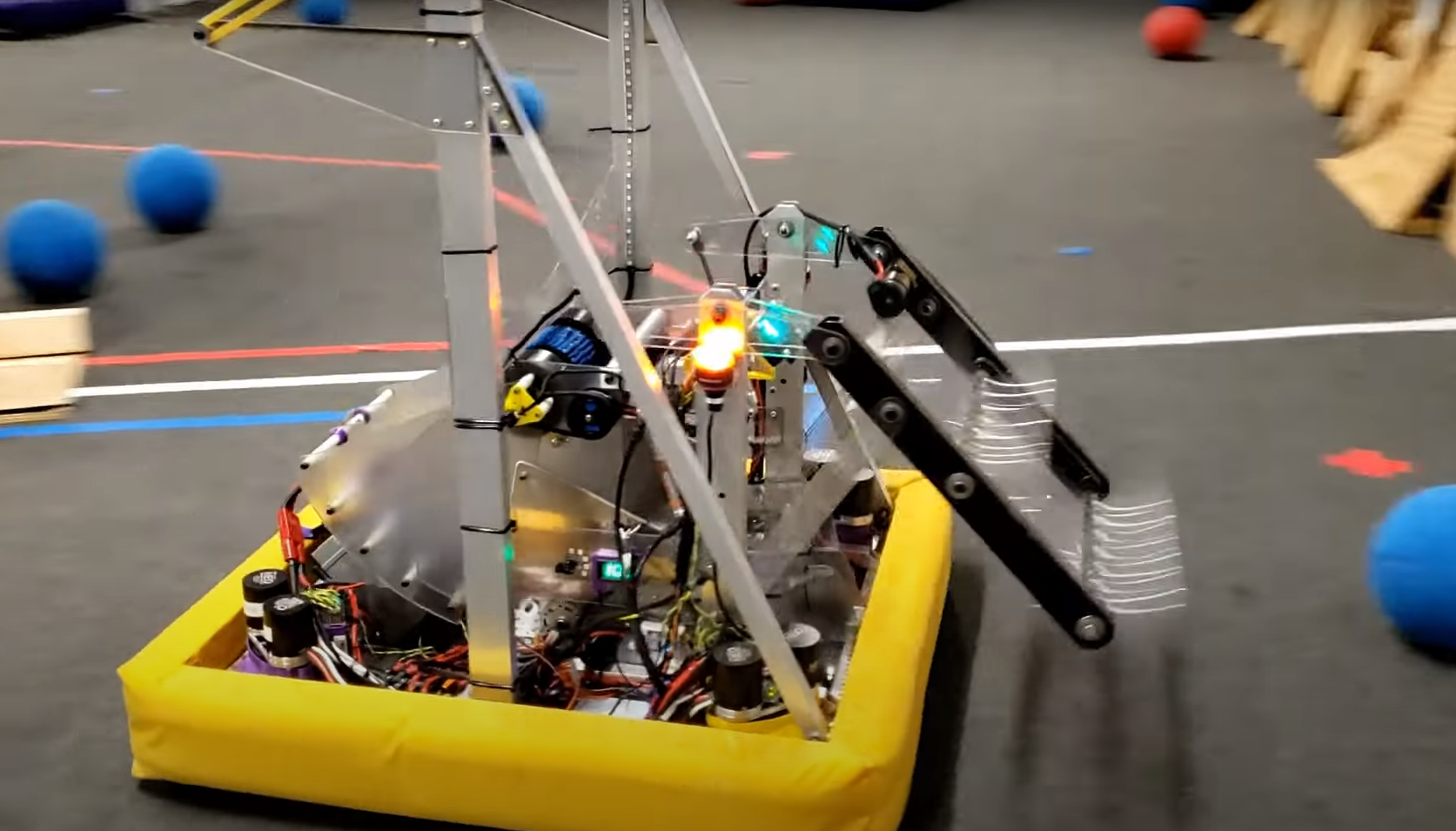
Genome Nu (2022) BOM

While preparing a Bill of Materials is not required as part of the 2022 FIRST Robotics Competition game Rapid React, Triple Helix has prepared a partial one anyway for our 2022 robot Genome Nu. The BOM serves as a reference document for the team.