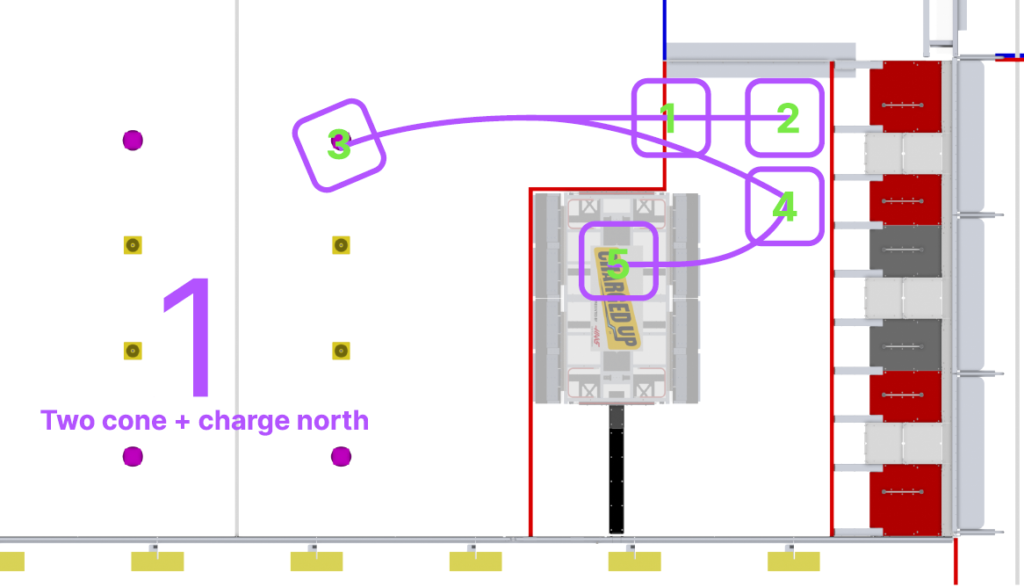
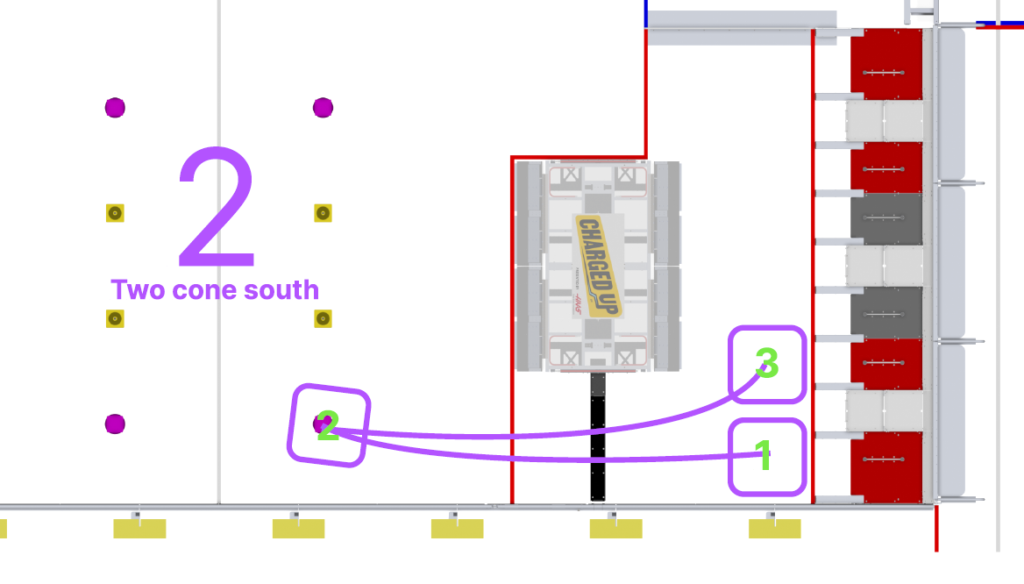
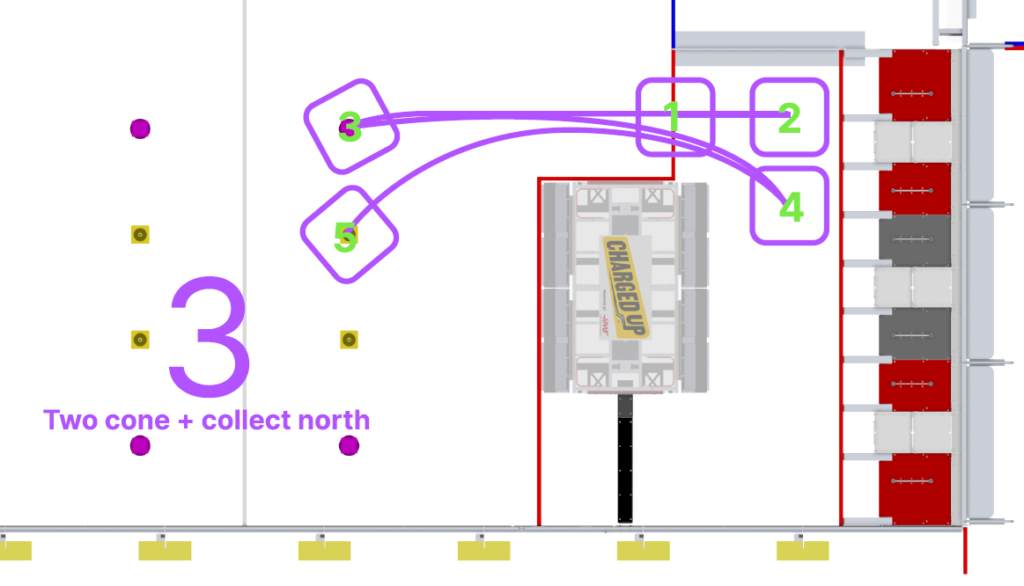
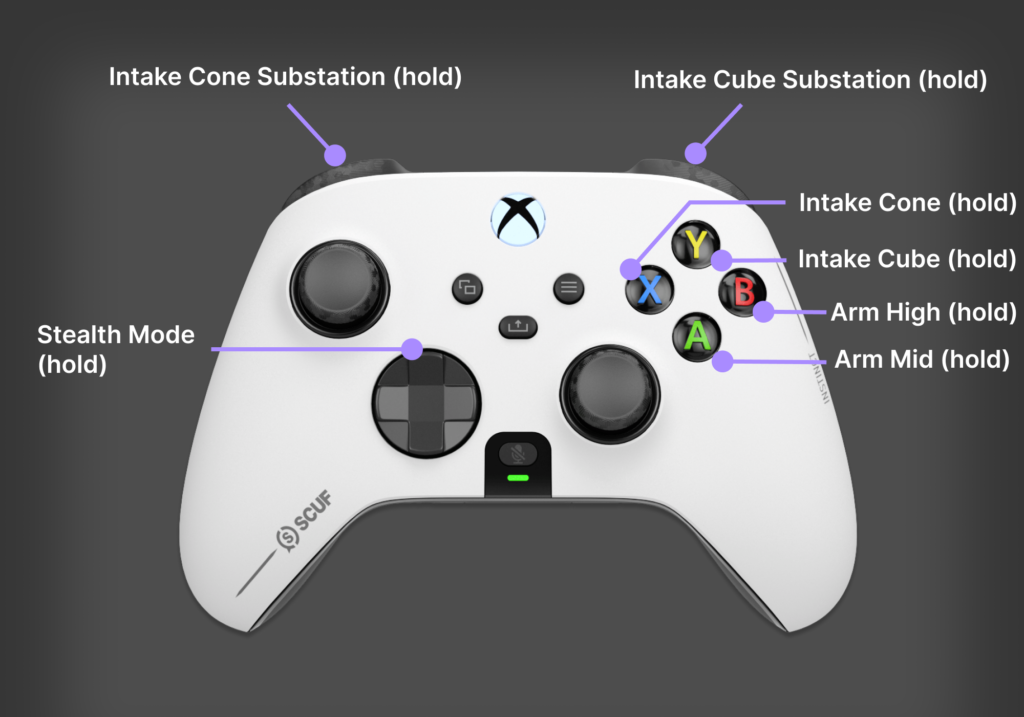
Genome Xi (2023) controller maps
When setting up new laptops for the team, Triple Helix installs the following suite of programs.
Triple Helix strongly endorses WPILib’s Driver Station Best Practices guide for driver station laptops.
All software required for an FRC driver station laptop, plus:
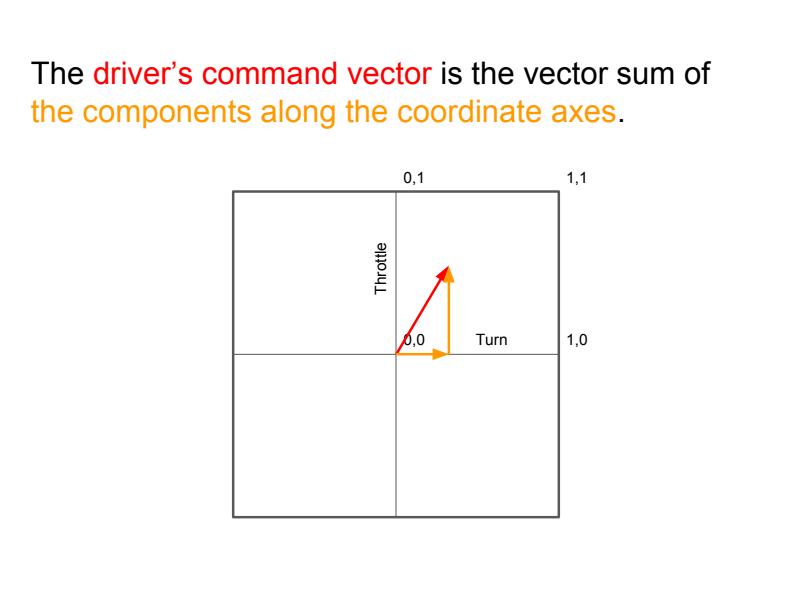
“Arcade Drive” is a popular joystick control method for skid-steer robot drivetrains, where one joystick axis controls the “throttle” (speed forward and back) and the other axis controls the rate of rotation of the robot chassis.
We provide a method for scaling the [-2, 2] range of (throttle command + turn command) down to [-1, 1] for use with an arcade drive.
This scaling is applied smoothly with no discontinuities anywhere in the input range. There is also no loss of information– both outputs (power/speed commands to motor controllers on the left and right sides of the drivetrain) always depend on both inputs (the driver’s throttle and turn joystick commands).

Triple Helix mentor Matt Lythgoe presents on command based java programming for FRC. For several years, Triple Helix has presented these two sequential sessions at the annual FRC Workshop event at Virginia Commonwealth University to an audience of other FRC students and mentors.